
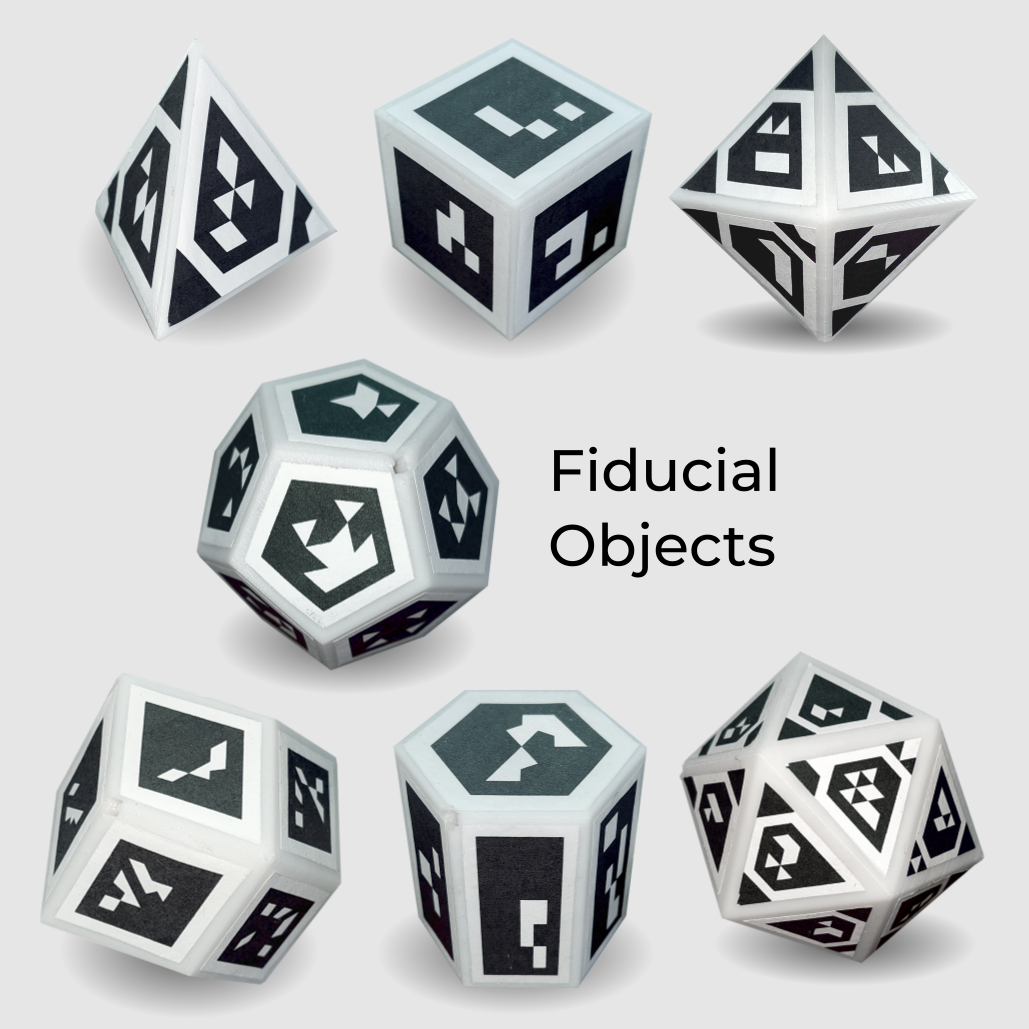
Fiducial Objects: Multiplanar customizable fiducial markers
Fiducial objects are fiducial markers introduced in the multiplanar space. They can be composed of any set of customizable fiducial markers, arranged in fully customizable structures. This approach allows for computing the camera pose in a more stable and robust manner, enhancing resistance to distortions. Moreover, the pose estimation process is achievable even by using individual parts of the fiducial object, without requiring the complete fiducial object to appear in the image.
Tutorials
We have prepared some initial tutorials in order to take a first contact with the tool!
Download
To support the research community and encourage further exploration, we have made our code, tutorials, and applications readily accessible. Researchers and developers can now build and calibrate their custom fiducial objects using the comprehensive resources available at the following links:
- Download the code from SourceForge . Developed using CPP
 , OpenCV
, OpenCV  ,CMake
,CMake  and QT Creator
and QT Creator  . We include a user-friendly GUI Interface.
. We include a user-friendly GUI Interface. - Access the dataset generated for the source paper at SourceForge .
Citing
If you use this library in your research, you must cite:
- García-Ruiz, P.; Romero-Ramirez, F.J.; Muñoz-Salinas, R.; Marín-Jiménez, M.J.; Medina-Carnicer, R. Fiducial Objects: Custom Design and Evaluation. Sensors 2023, 23, 9649.
- Jurado-Rodriguez, D., Munoz-Salinas, R., Garrido-Jurado, S., Medina-Carnicer, R.: Design, detection, and tracking of customized fiducial markers. IEEE Access 9, 140066–140078 (2021).
Paper
The paper that outcomes this project can be seen here.
License
This software is licensed under MIT license.
Contact
If you have any further question, please contact pgruiz@uco.es.
Please support my career through my Github and YouTube profiles ![]() .
.
Related Projects
Marker Mapper and Aruco.